- 在 move_base_hori_line.py 中,改进了 arc_turn_around_hori_line 函数,使用平滑停止方法替代强制停止,并添加停止过程中的角度监控。 - 新增 arc_turn_precise 函数,实现更精确的圆弧转弯控制,分阶段控制速度,提升转弯精度。 - 新增 arc_turn_around_hori_line_precise 函数,结合横线检测与精确转弯功能,确保机器人在执行任务时的路径更加准确。 - 在 base_msg.py 中,新增 stop_turn_smooth 方法,提供更细致的速度减小策略,确保旋转动作的平稳停止。
{kind=link}
任务模块
top
- “装货 / qrcode”
- 曲线赛道
- 上下坡
- 存在两种可能性
- 石板道
- 栅栏 / 栏杆
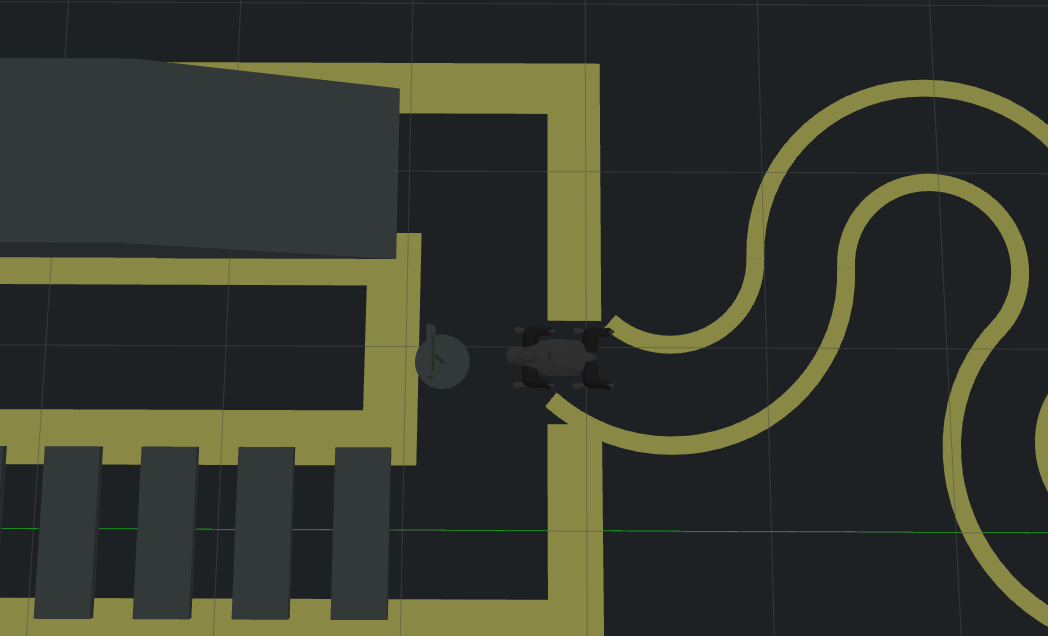
Task-1:出生点 - 取货
从二维码取货完,然后走到弯道入口。
校准前方横线 & 距离距离
RGB 摄像机所在位置的确定: 主要是需要确定其高度。
Task-2:弯道任务
过去,以及回来。两个方向都需要。

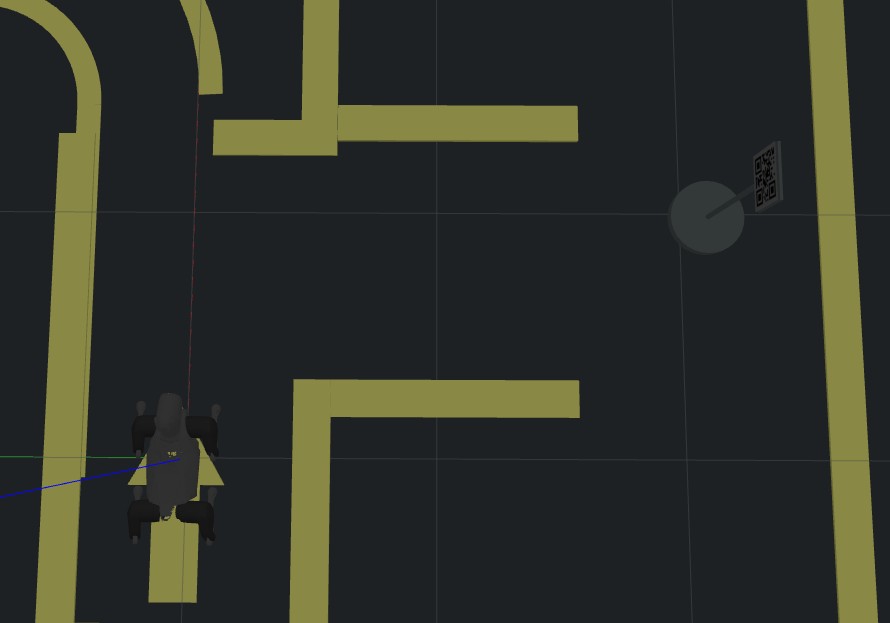
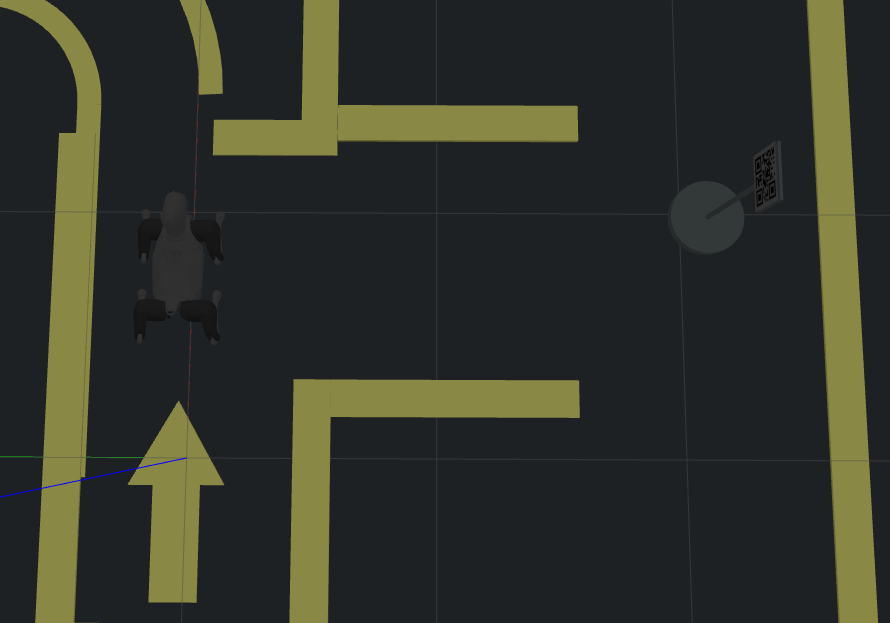
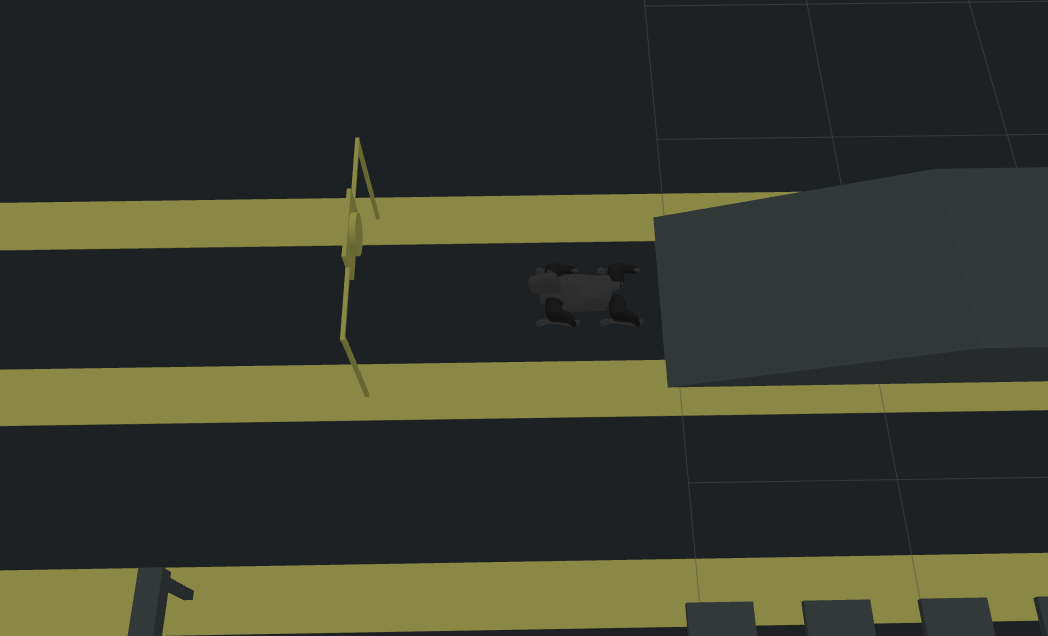
Task-2.5:识别
根据箭头决定方向。
这里采取传统cv的基于凸包计算的算法。
Task-3:上下坡
同样需要考虑两个方向。(正式计时各有一半的概率)
感觉两个坡度稍微有一点点区别。
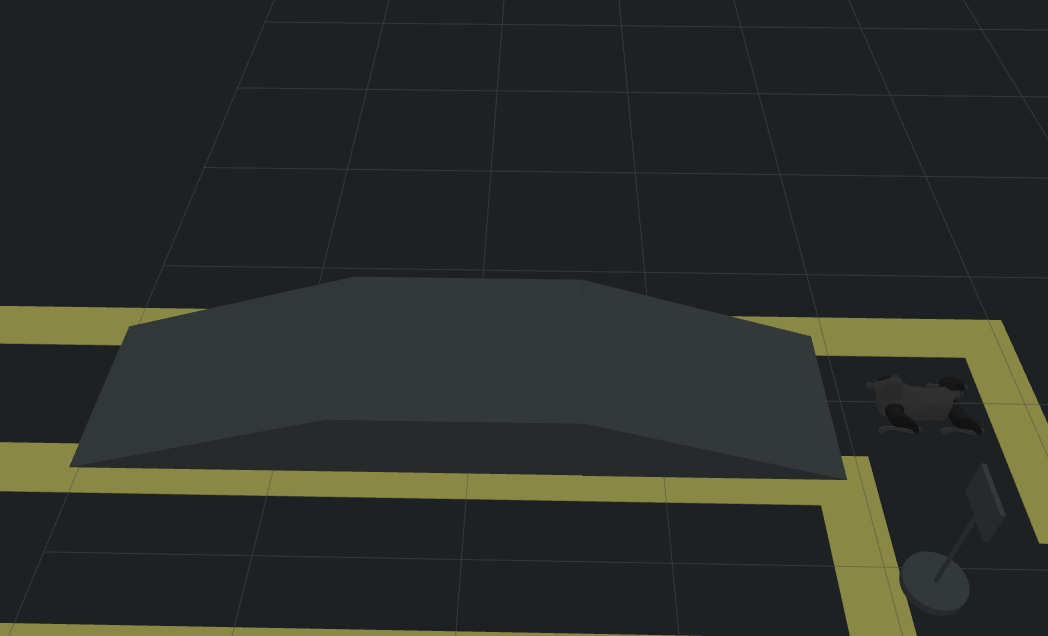
以及反方向。
Task-4:石板路
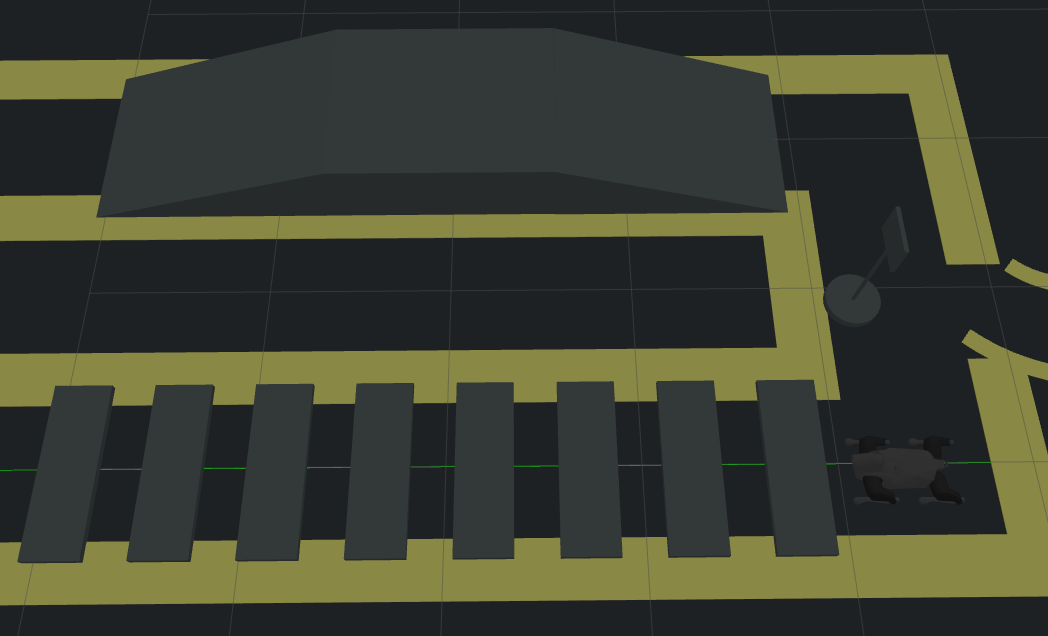
Task-5:过栅栏
Task-5.5:走向卸货
从上一个赛道结束到 B 二维码。
Task-6:卸货
也可能在另一边。 这里是感觉在走过去的过程中就能判断二维码。